
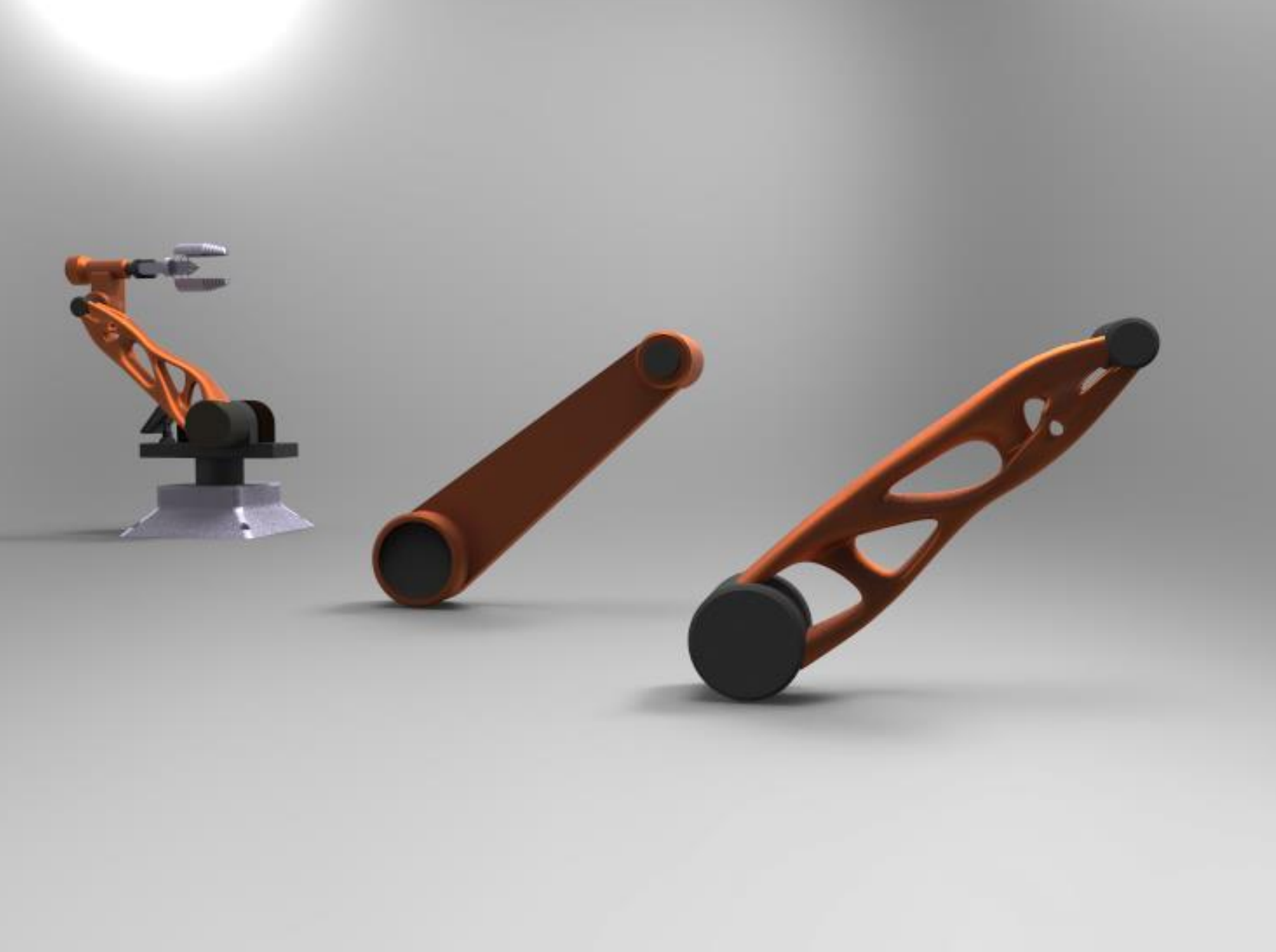
The objective was to reduce weight from the arm of an industrial robot to increase efficiency while retaining the strength. The manipulator was designed to handle two tasks - drilling soil and extracting a sample - without changing the attachments.
The result was a 40% weight reduction from the base design, achieved with the SIMP topology optimization method.
What topology optimization is
Topology optimization is a mathematical method that decides where to put material inside a given design space, for a defined set of loads, supports, and constraints, so that performance is maximised and mass is minimised. Unlike sizing or shape optimization - which tweak the dimensions of an existing form - topology optimization can change the fundamental layout, producing the organic, load-path-following geometry typical of optimised parts.
The SIMP method
The approach used here is SIMP - Solid Isotropic Material with Penalization, the most widely used topology-optimization scheme:
- The design space is divided into finite elements, and each element is given a density variable between 0 (void) and 1 (solid).
- A penalization exponent (typically p = 3) makes intermediate “grey” densities inefficient, pushing the solution toward a clean solid-or-void layout that is actually manufacturable.
- The optimiser iterates using sensitivity analysis, minimising compliance (i.e. maximising stiffness) subject to a volume-fraction constraint - the target amount of material allowed.
The outcome is a structure that carries the load along the most efficient paths, which is exactly why the optimised arm keeps its strength after shedding 40% of its weight.